Application of the Design Process Competency
Problem Definition
The objective was to design a prosthetic right hand capable of picking up, holding, and manipulating a TV remote for a user who lost their hand in an accident. Constraints included using either 3D-printed or LEGO components, Arduino or LEGO Mindstorms for actuation, and sizing the prosthetic to match group-averaged hand measurements collected in a prior unit.
Research
Individual research covered hand anatomy, prosthetic mechanisms, grip materials, and joint design. A key finding from the Cleveland Clinic established that precise hand movement depends on a coordinated system of bones, muscles, ligaments, and joints. Particularly relevant was the thumb's saddle joint, which enables opposition — the mechanism responsible for gripping and stabilizing objects. This directly informed our joint design. Additional research identified PLA as a cost-effective printing material, and friction-enhancing surfaces like rubber and hot glue as practical grip improvements for the palm and fingers.
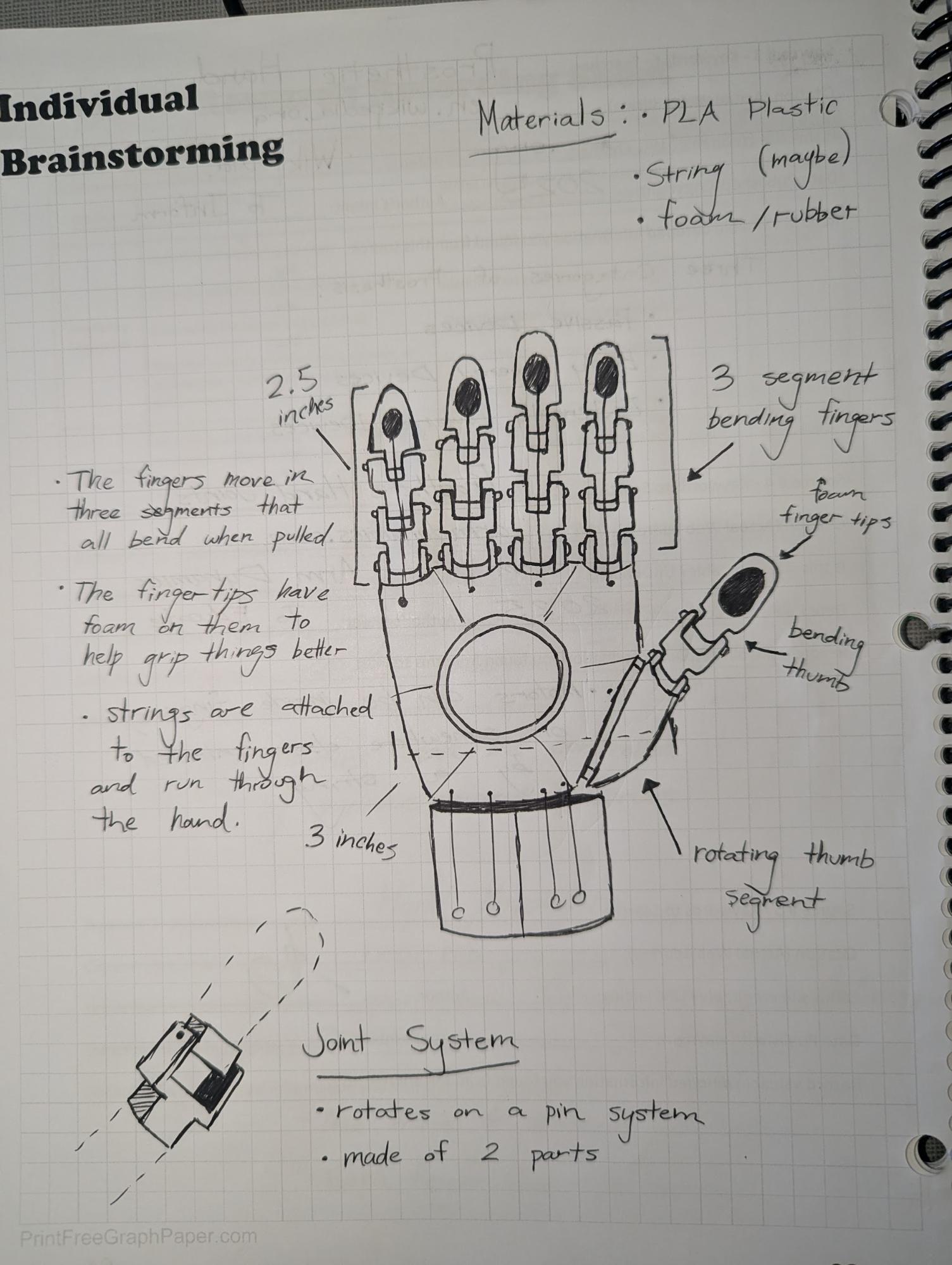
Ideation and Design Selection
Each group member independently developed a prosthetic concept. Designs ranged from a simple string-pull finger system to a padded palm with string-channel routing, to a three-segment rotating joint system modeled on human finger anatomy. A decision matrix evaluated each concept across functionality, design simplicity, time feasibility, and likelihood of success. The padded palm design ranked highest for grip strength, while the three-segment joint system stood out for realistic finger actuation. A hybrid design was selected, combining the padded palm and string routing from one concept with the three-segment joints and rotatable thumb from another, aiming to maximize both grip reliability and mechanical fidelity within our constraints.
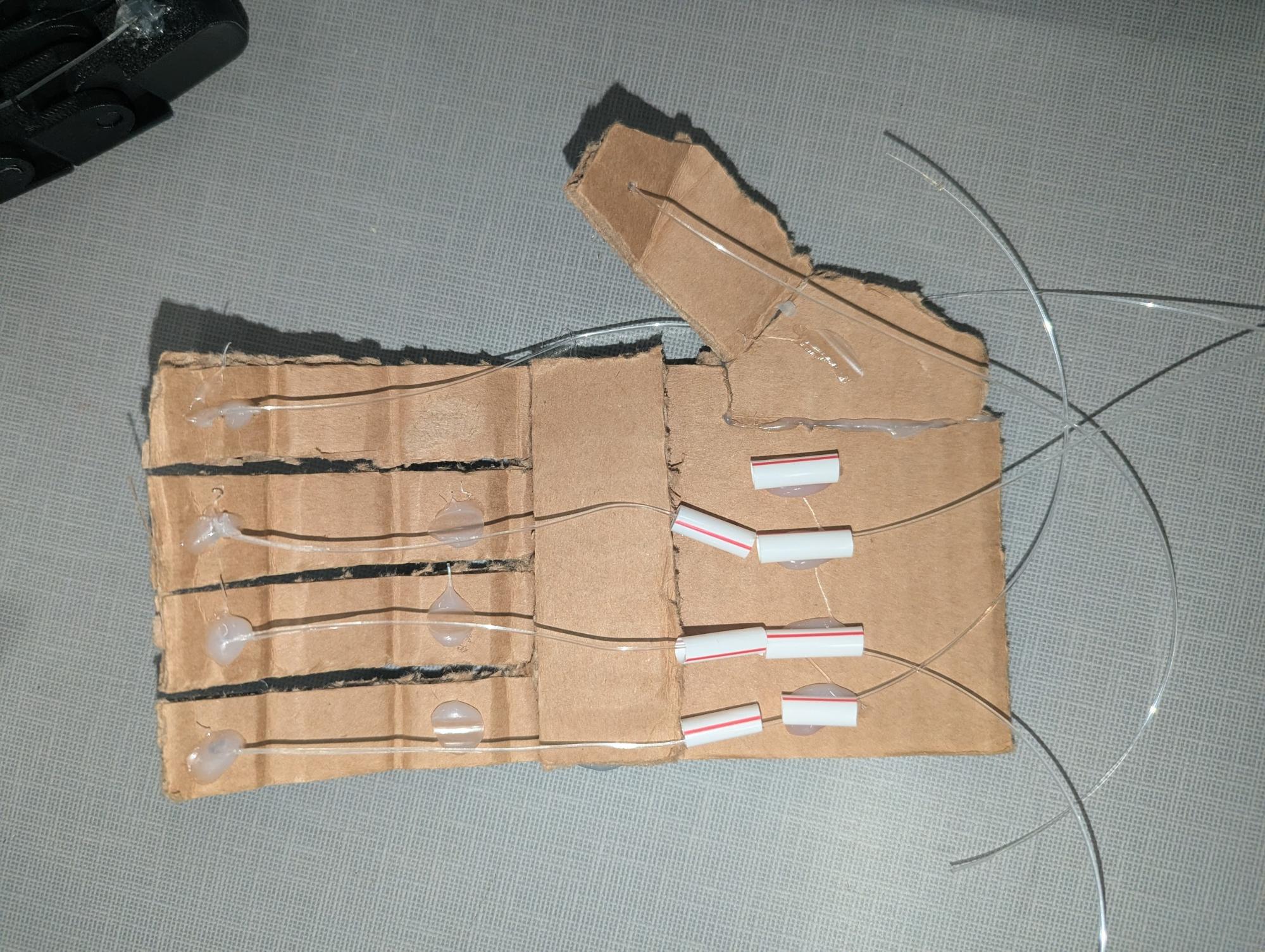
Prototyping and Testing
Two cardboard prototypes were built using fishing line to simulate tendons. The first routed line through the fingertips but produced high friction and unnatural motion at the joints. The second added a thumb and replaced the open routing with short straw segments glued at joint intervals, keeping the line flush to each finger segment to reduce friction and more closely approximate tendon behavior. This prototype bent smoothly and validated the hybrid joint concept, giving the group confidence to move forward with CAD modeling and 3D printing.
Measurements and Calculations
To ensure anthropometric accuracy, each group member measured their own hand across 19 dimensions including finger lengths, palm width, grip diameter, and hand thickness. These were averaged and used as the primary scaling reference for both the cardboard prototypes and the final CAD model, ensuring the prosthetic remained proportionally consistent with a real hand and compatible with a standard remote form factor.
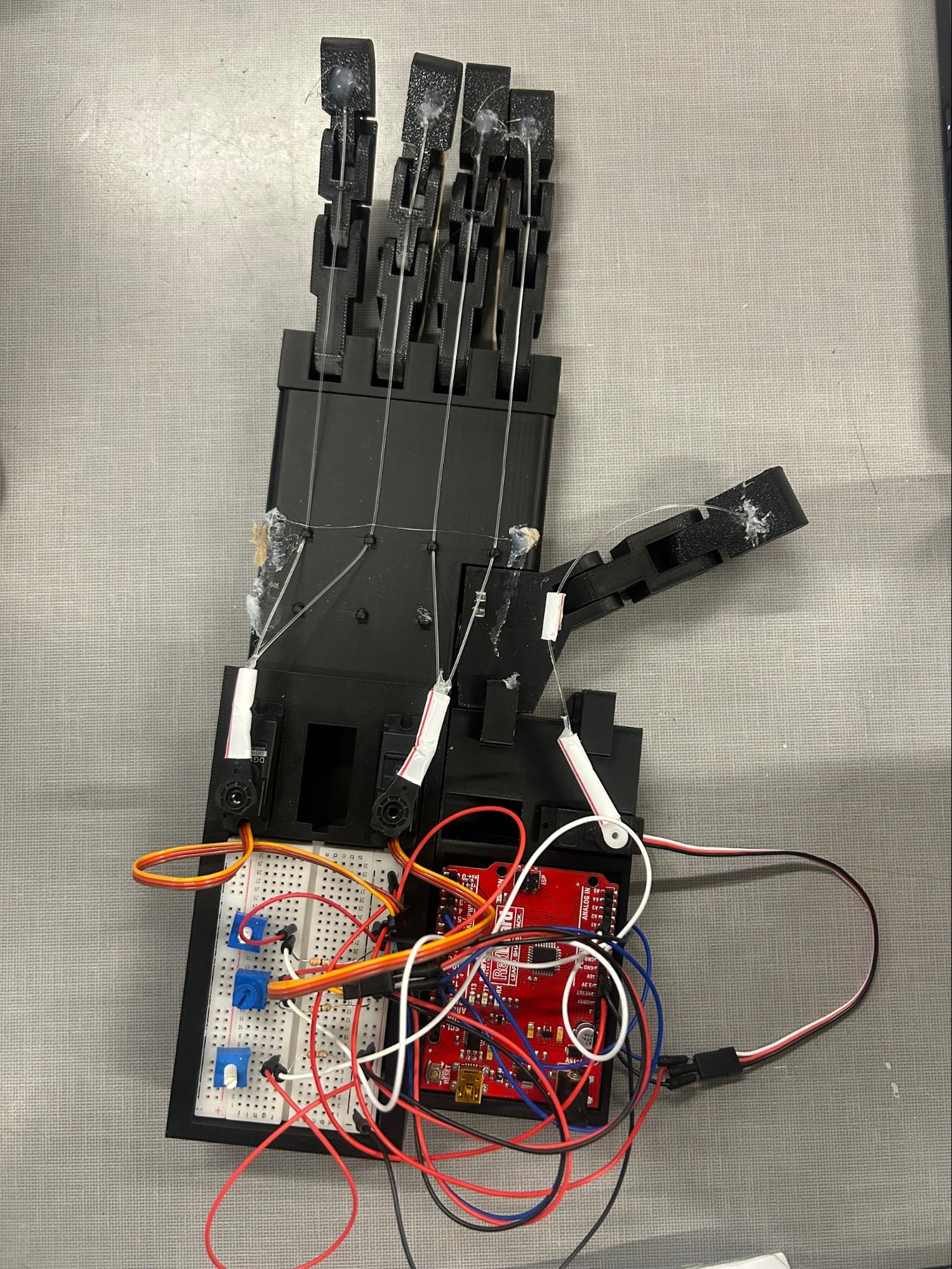
Final Design and Results
The final 3D-printed hand incorporated internal string channels for smoother actuation, finger guides at each joint segment, and rubber bands along the dorsal side of the fingers to provide passive extension return after flexing. The string anchoring method was also revised for more reliable tension control. Despite these refinements, testing revealed a critical failure point: the thumb was insufficiently long and not angled correctly, causing the remote to slide past it rather than be held in place. The primary objective was not achieved.
Reflection and Recommendations
The design process effectively guided the project from problem definition through iterative prototyping, with each phase informing the next. The final shortcoming was well-understood and isolated: extending the thumb by 1 to 2 centimeters and increasing its opposition angle would likely resolve the grip failure. More broadly, the project showed how structured iteration produces meaningful progress even when the end result falls short. The hybrid design selection, friction reduction modifications, and measurement-based scaling all came directly out of applying the design process, and the clearly identified failure point provides a concrete direction for a subsequent iteration.